Infografia
Um mergulho em grutas a bordo de um robô com tecnologia portuguesa
E splash! Sustivemos a respiração e mergulhámos no mundo das grutas inundadas através dos “olhos” de um robô com tecnologia desenvolvida em Portugal. É considerado um dos robôs subaquáticos tecnologicamente mais evoluídos do mundo. Preparados?
Antes de começarmos uma viagem por grutas na Europa, temos de conhecer quem nos vai guiar — o robô UX-1Neo. Foi criado para explorar espaços inundados confinados, nomeadamente grutas subterrâneas inundadas.
Desenvolvido com base em tecnologia de robôs submarinos, foi feito para funcionar debaixo de água e ser manobrado em espaços apertados e ambientes extremos, aonde é difícil ou impossível que mergulhadores cheguem.
ESCALA HUMANA
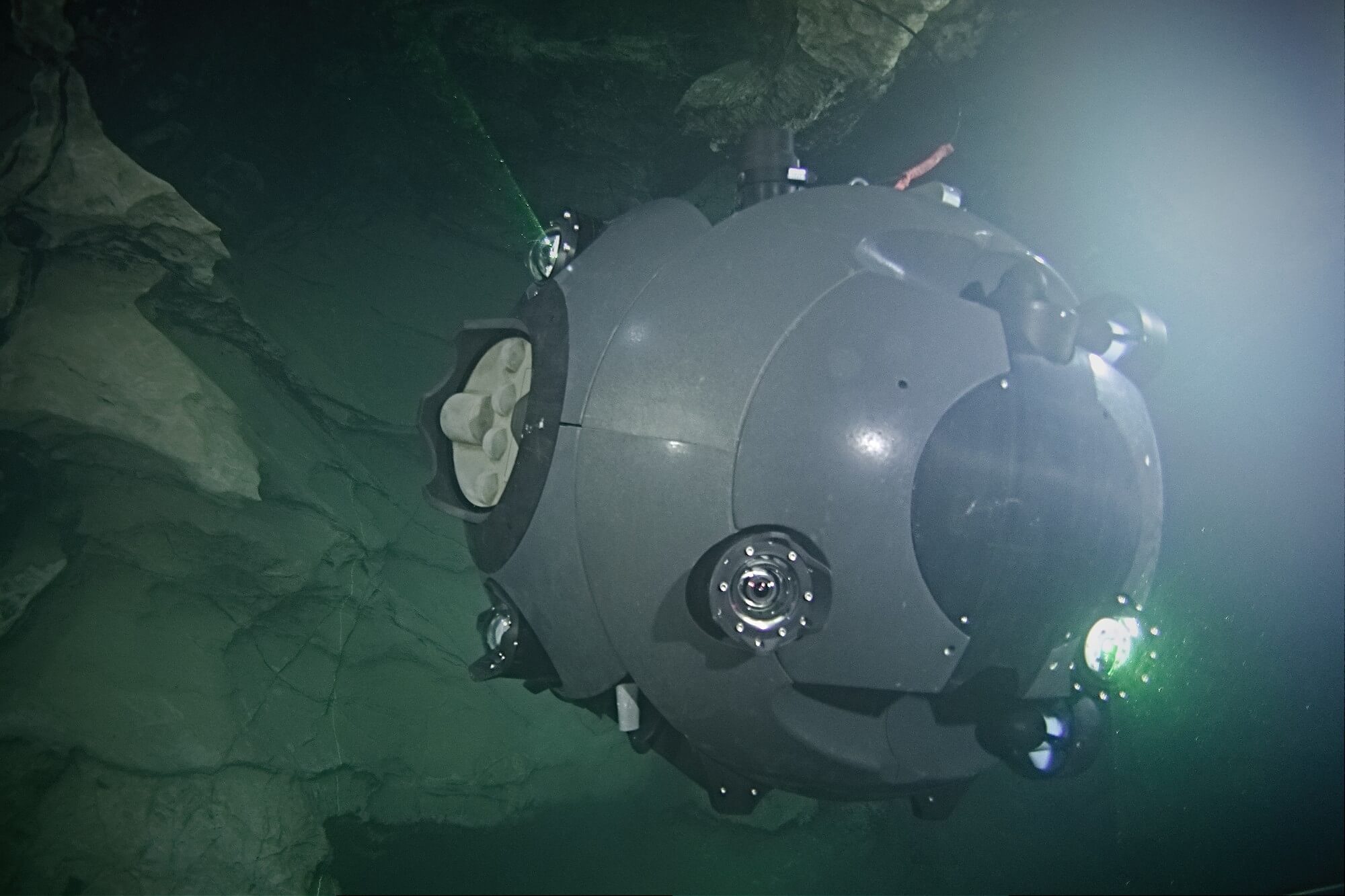
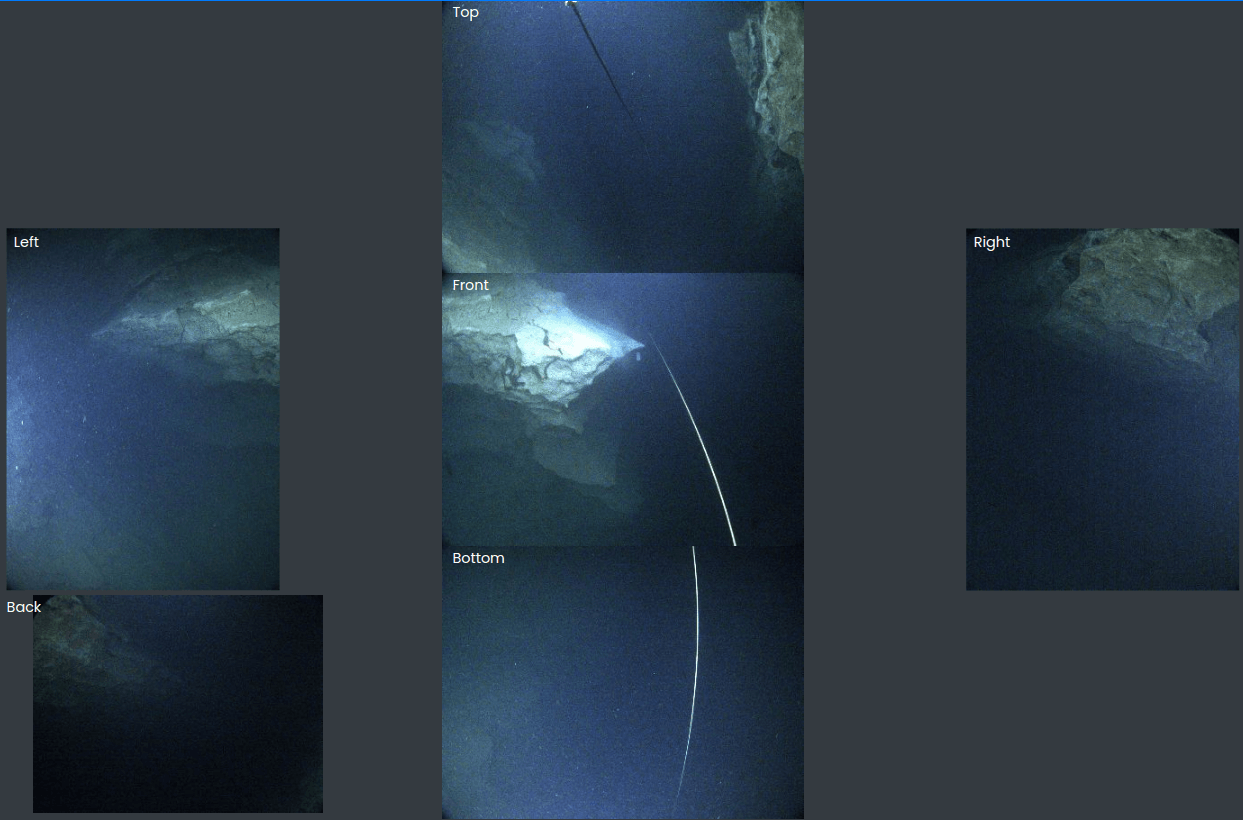
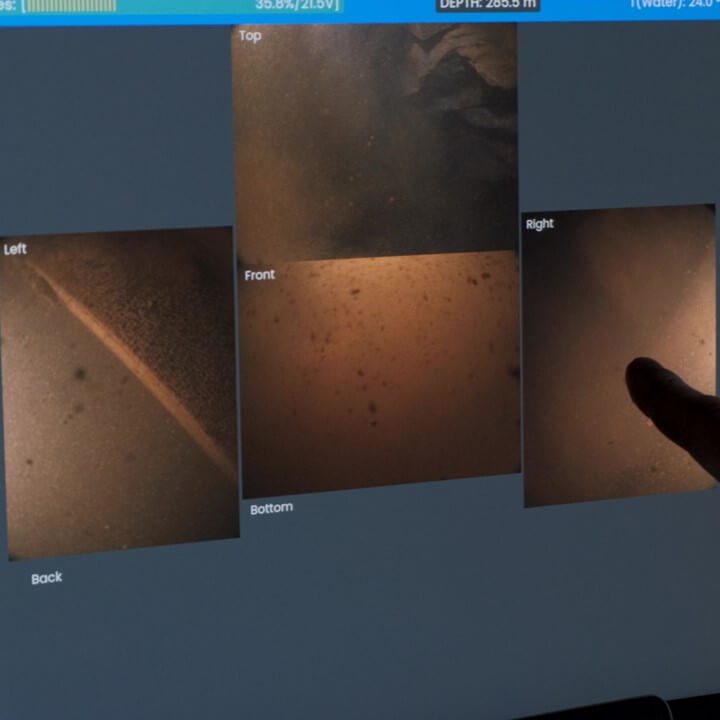
É um veículo que também consegue fazer missões completamente autónomas e tem sempre uma grande precisão na navegação. Tudo graças à sua “anatomia”: tem um sonar multifeixe, dois sonares de varrimento rotativo, seis câmaras e seis sistemas de reconstituição tridimensional de luz estruturada.
SONAR MULTIFEIXE
CÂMARAS
ILUMINAÇÃO
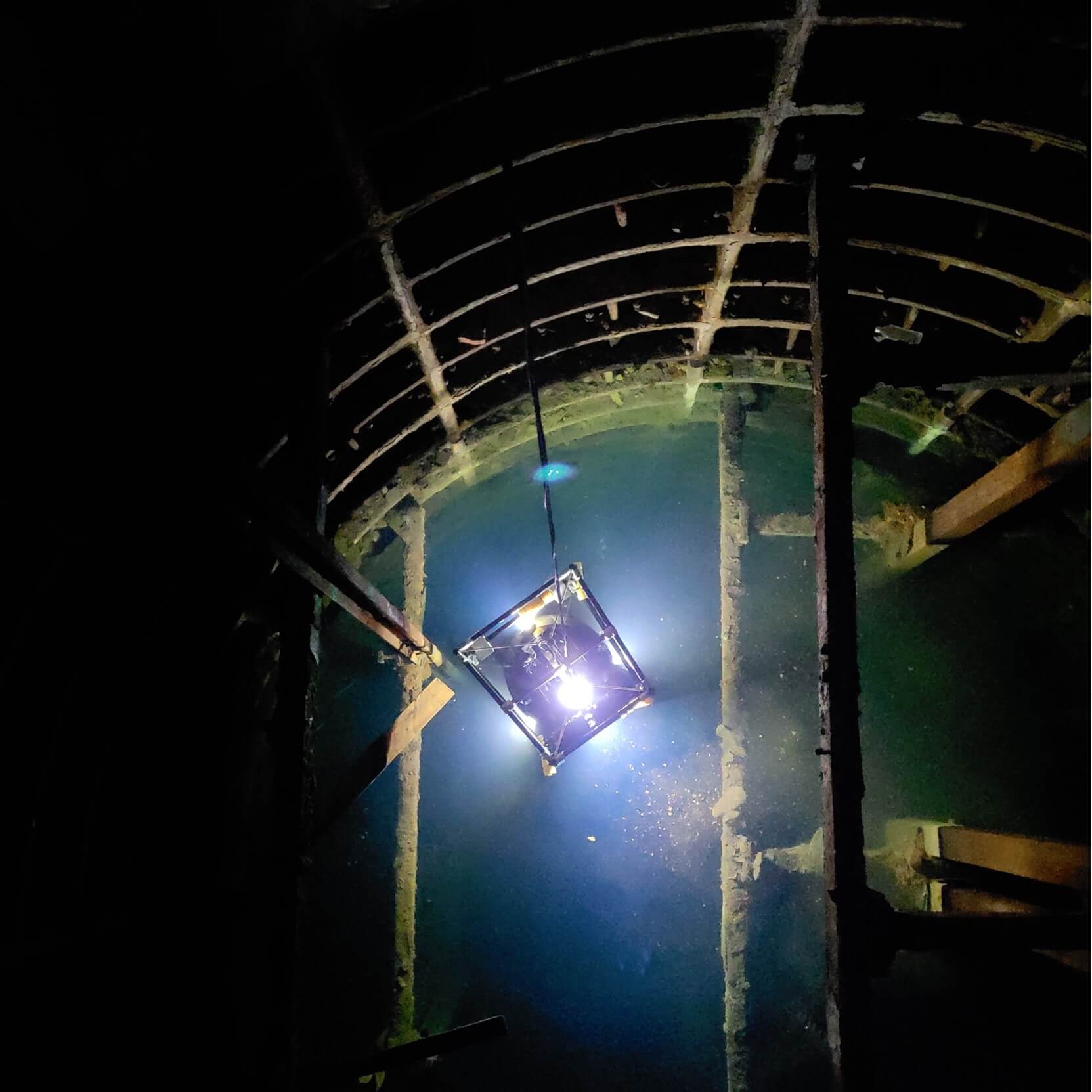
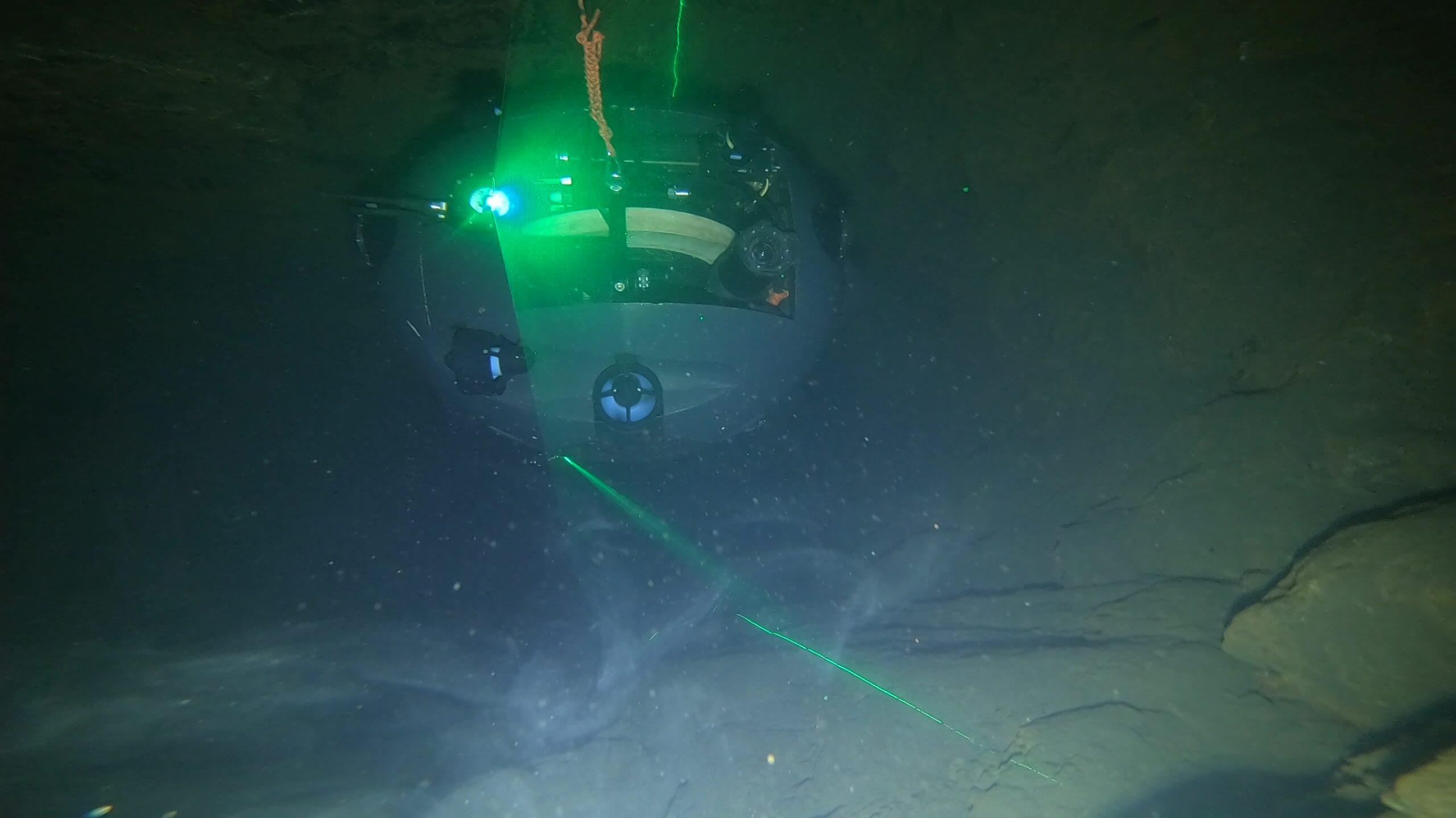
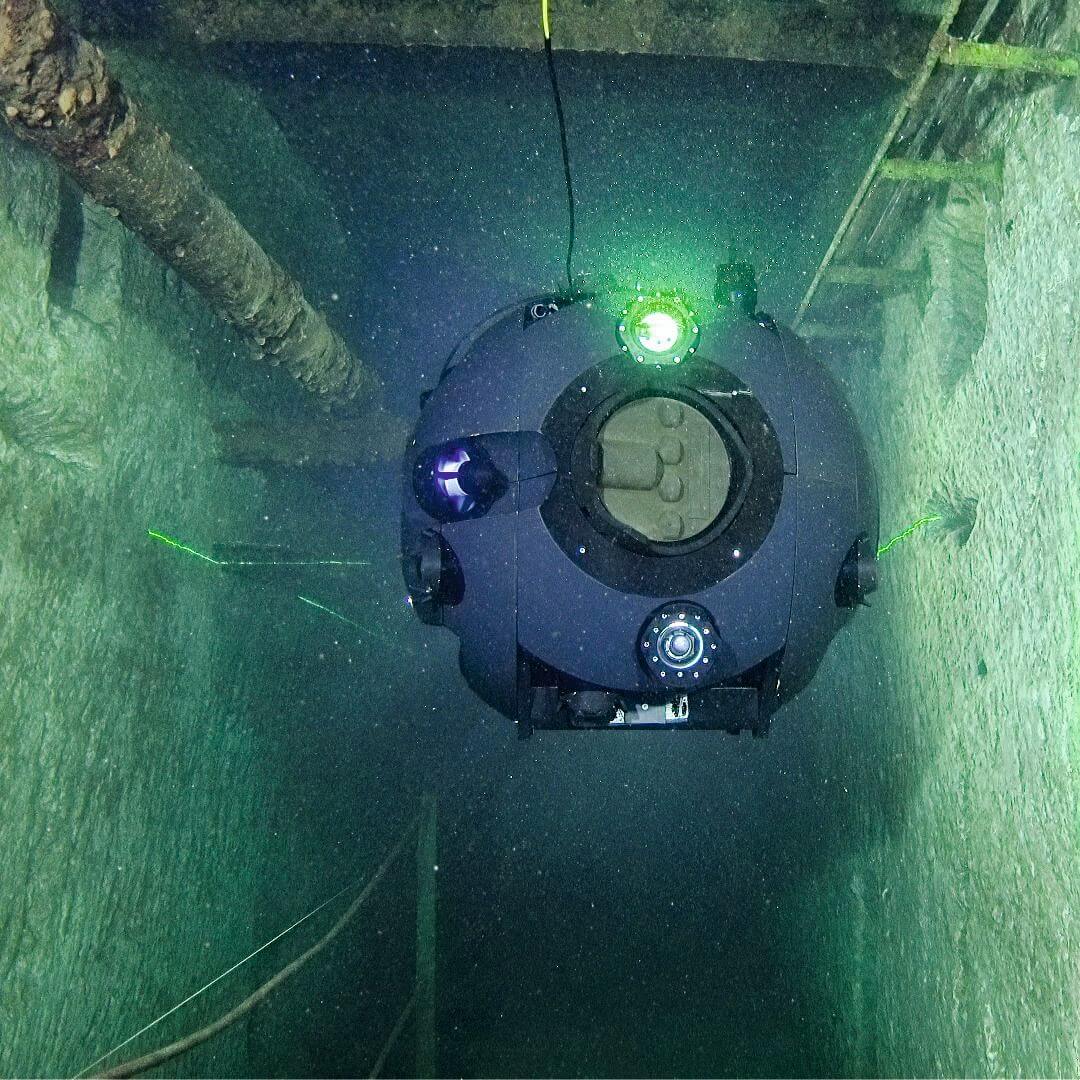
Missão na gruta de Molnár János em Budapeste, na Hungria
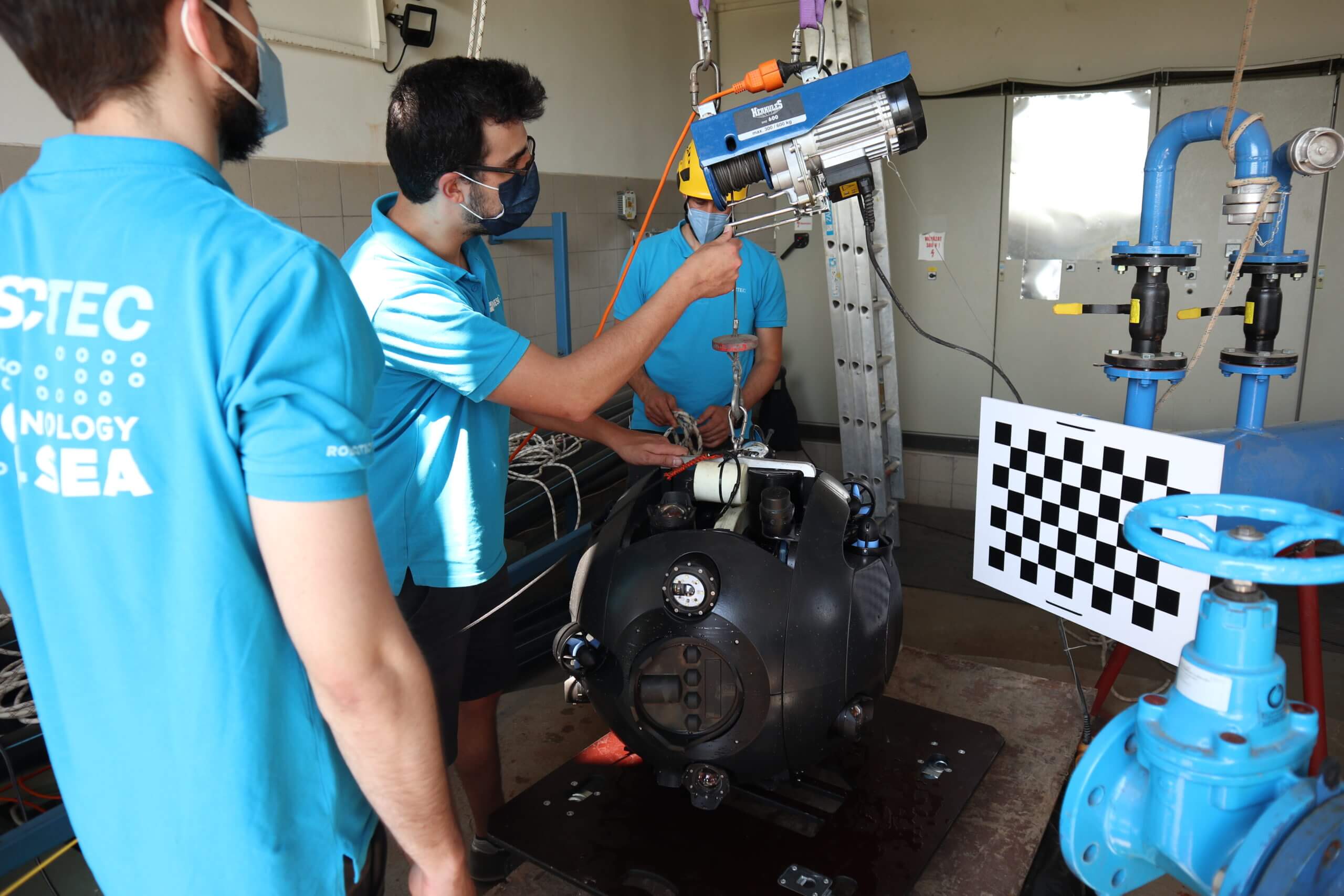
Tecnologia desenvolvida em Portugal

A tecnologia do robô foi desenvolvida nos laboratórios do Instituto de Engenharia de Sistemas e Computadores, Tecnologia e Ciência (Inesc Tec), do Porto. Antes do UX-1Neo — o veículo em que viajamos —, tinha sido criado um robô no projecto UNEXMIN, com um financiamento europeu de 4,8 milhões de euros. A partir dele, ganhou vida o UX-1Neo no projecto UNEXUP, que teve 2,9 milhões de euros da Europa e que termina este ano. Todo este trabalho inclui parceiros de vários países europeus.
Além do desenvolvimento tecnológico, foi criada uma empresa para que o robô possa fazer serviços de inspecção e de análise geofísica. “O grande objectivo é que explore minas terrestres inundadas”, diz Alfredo Martins, investigador do Inesc Tec nestes projectos e professor do Instituto Superior de Engenharia do Porto.
.jpg??)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
O que o torna especial no terreno
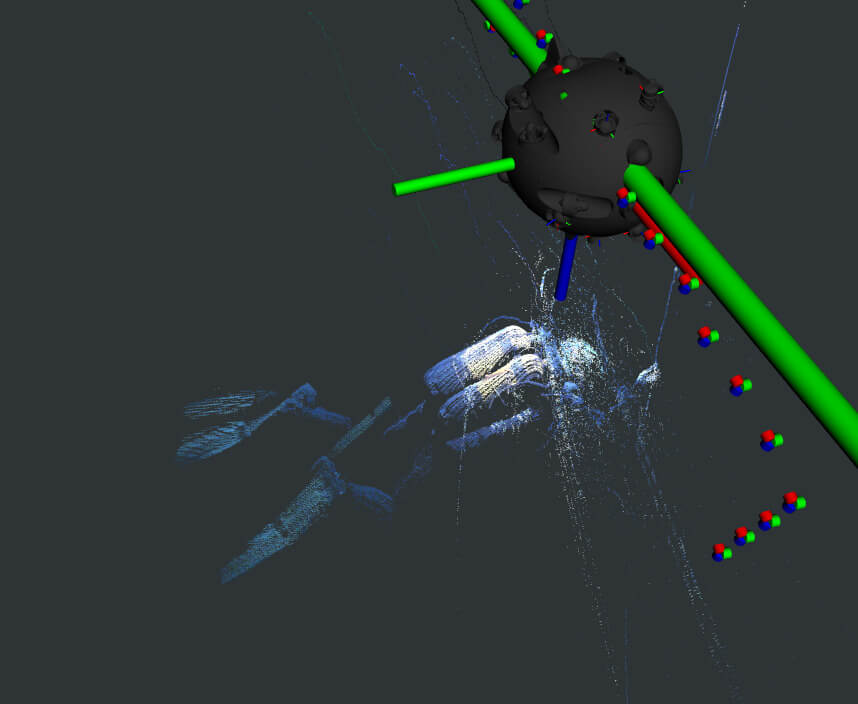
Nas suas explorações, o robô consegue movimentar-se de forma controlada em espaços confinados e obter um mapa do ambiente. O sonar multifeixe e os sistemas de luz permitem a recolha de medidas 3D, até com água muito turva. “Existem poucos robôs adequados para a exploração de cavernas e este é inovador por ser o primeiro a explorar minas inundadas com um conjunto de sensores único para a sua dimensão e para a profundidade a que vai”, explica Alfredo Martins.
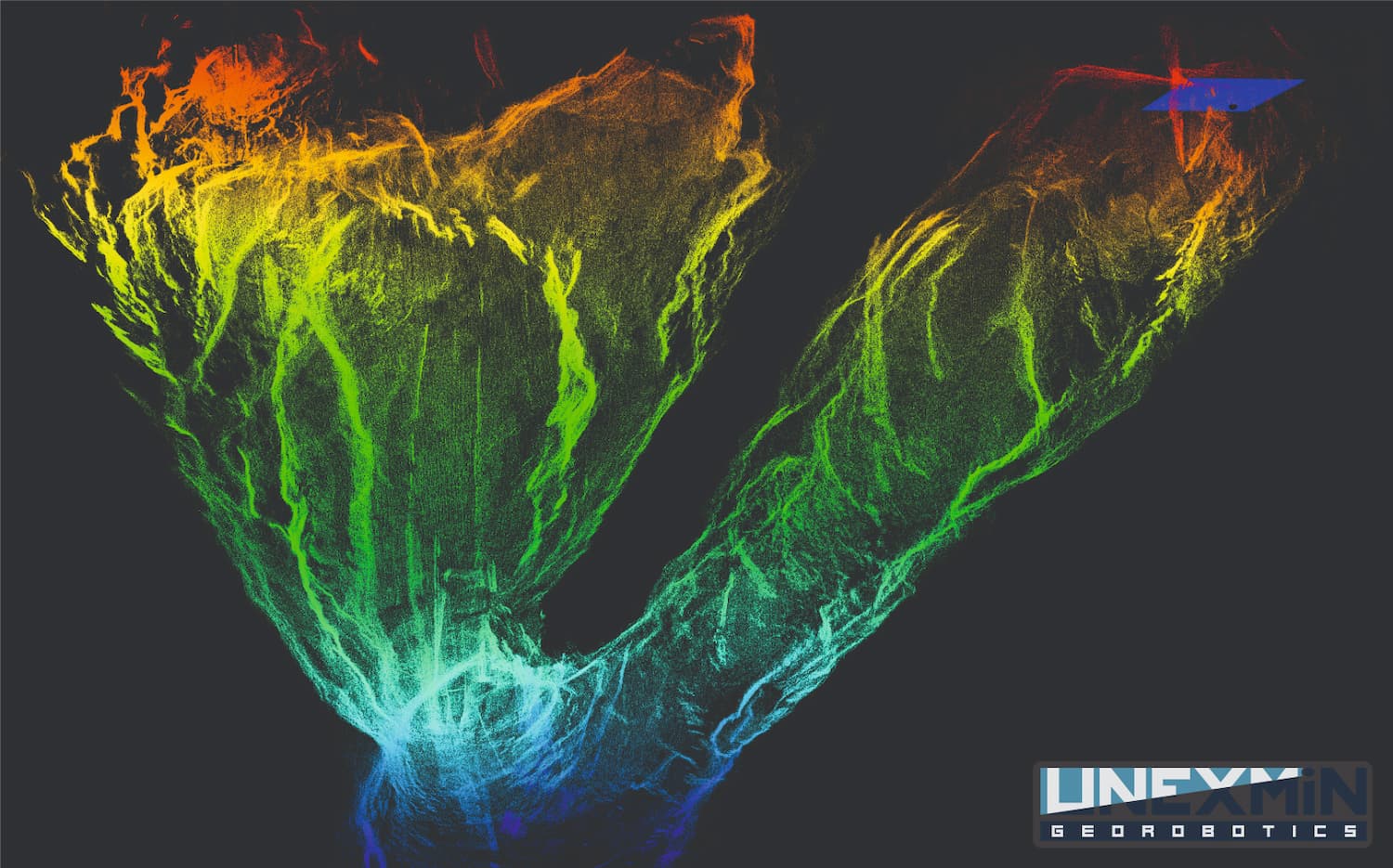
Expedição de 2022, abismo de Hranice
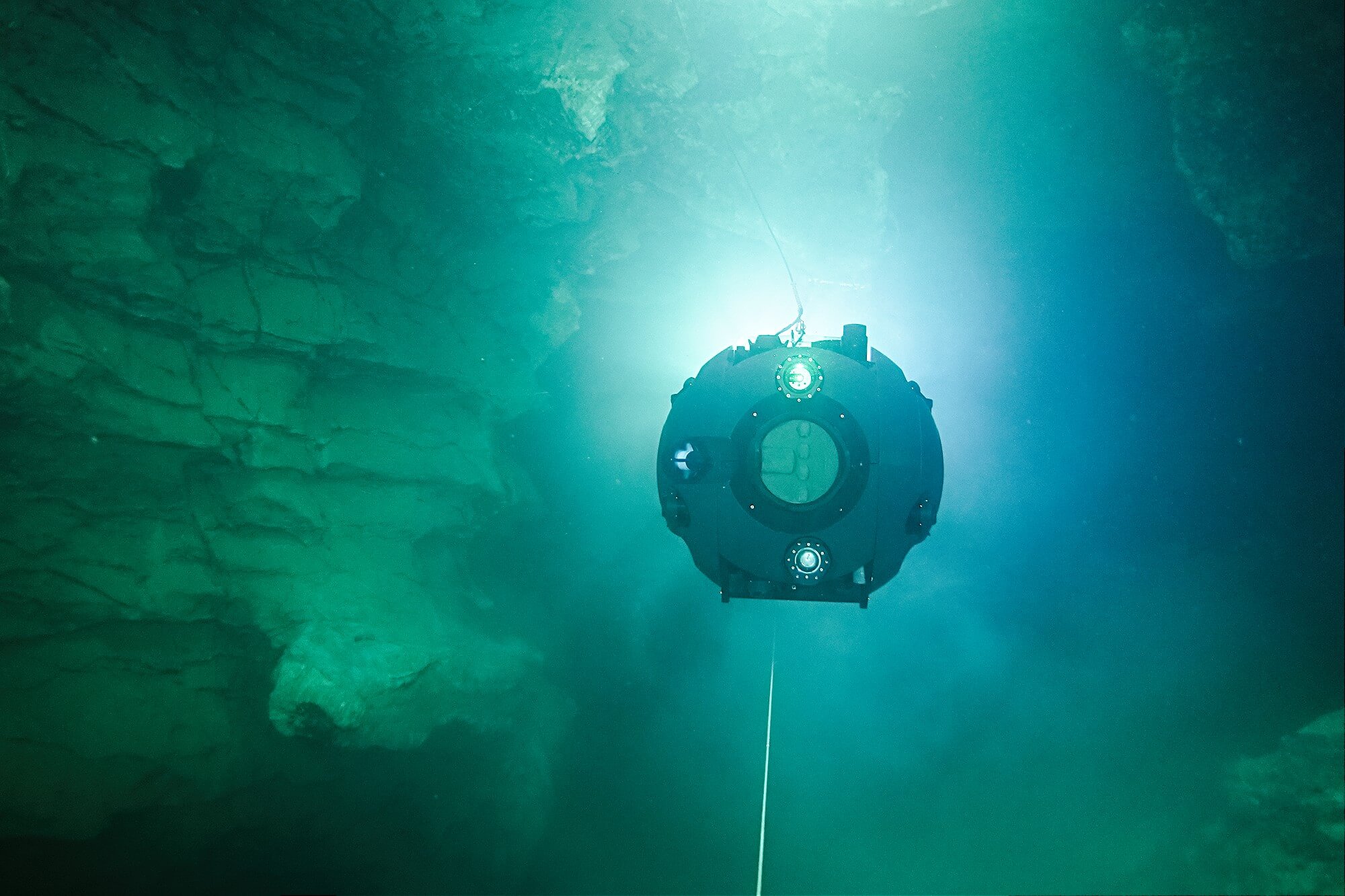
No terreno, o robô pode ser lançado com um cabo para o interior da gruta. Depois, os investigadores controlam e supervisionam-no remotamente. Também recebem dados e imagens. No final, recolhem-no. Há ainda outra opção: é programado, faz a missão autonomamente e espera-se que volte.


A superar limites

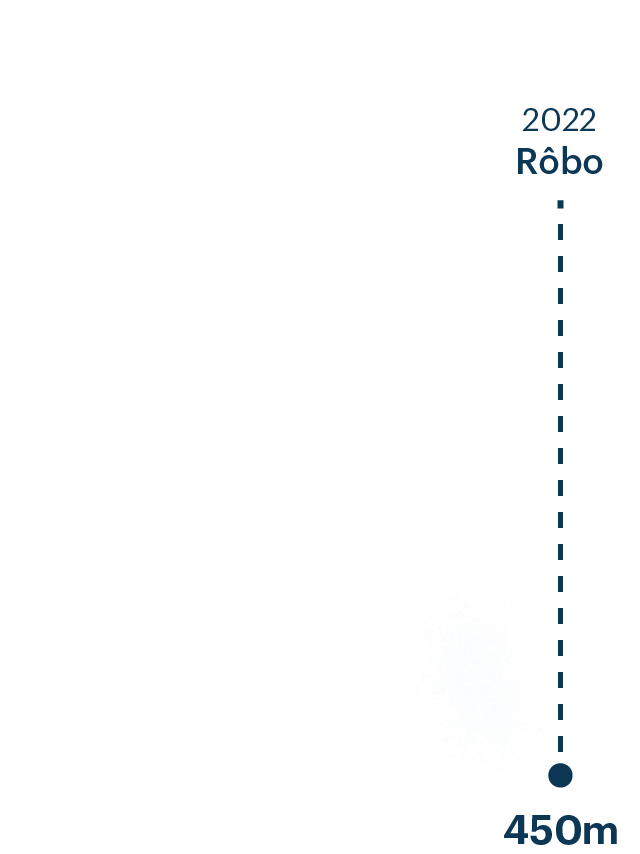
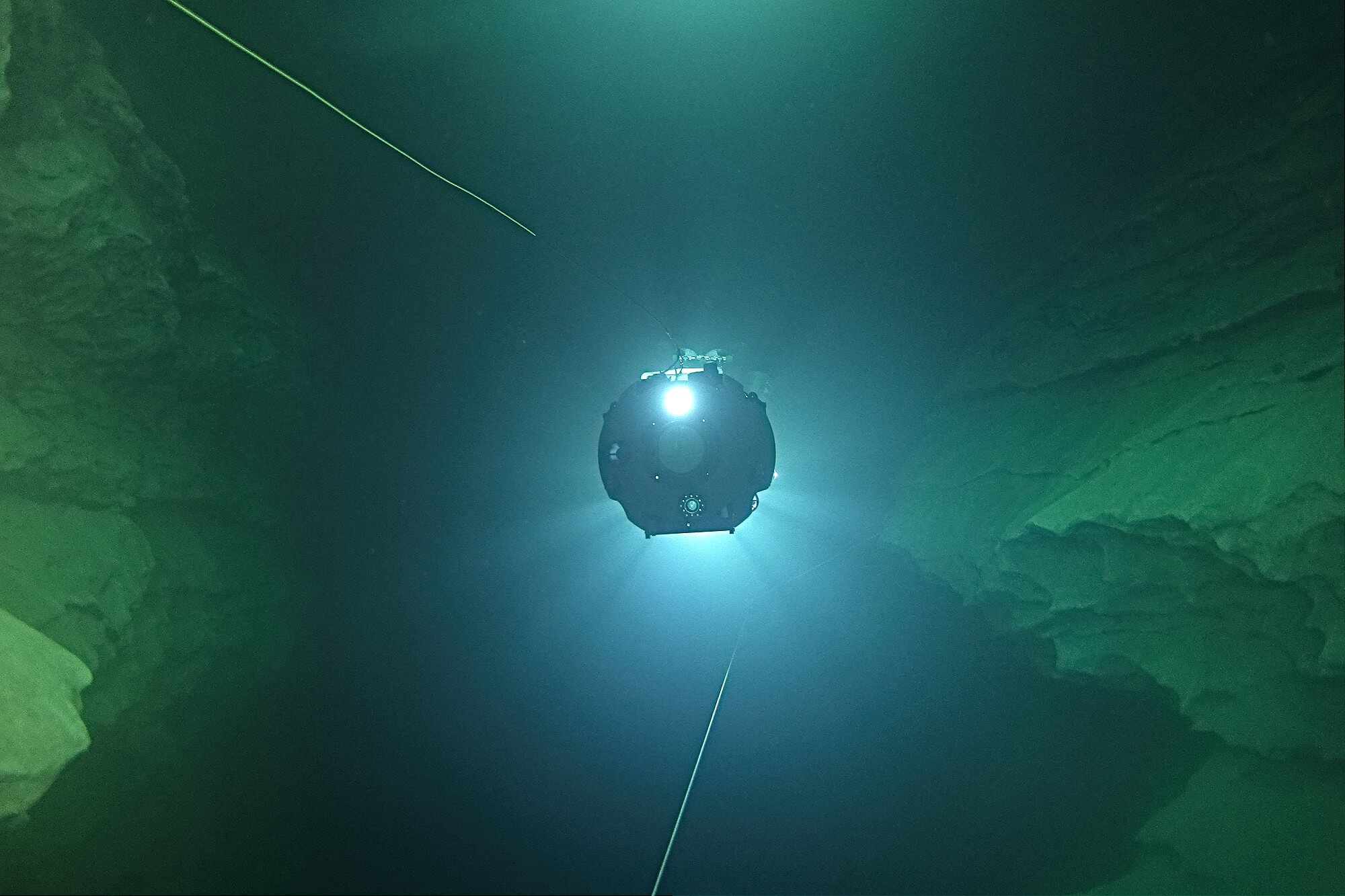
Este ano, o robô chegou até aos 450 metros de profundidade numa gruta da República Checa. Conseguiu assim alcançar o recorde de profundidade na exploração de grutas inundadas. Até então, o recorde tinha sido atingido numa missão da National Geographic com um pequeno robô subaquático (veículo operado remotamente — ROV), que atingiu os 404 metros nesse mesmo espaço em 2016. Aí, o humano só tinha chegado até aos 200 metros.
Mas a República Checa foi apenas um dos locais. Recordemos as viagens que o robô realizou em 2021 e 2022. Ao todo, fez dez missões em oito locais e mergulhou 76 vezes. Prontos para mergulhar também?

Um explorador de minas na Europa
Urgeiriça, Portugal
A mina de teste
Uma mina na Urgeiriça foi a eleita para testes, avaliação e desenvolvimento em ambiente real. Tem um poço vertical com galerias e permite algumas facilidades de acesso. “Vamos ao poço até onde é possível, porque está bloqueado a meio. É uma mina que usamos para validação”, diz Alfredo Martins. Fizeram-se lá vários testes em 2021. Num deles, conseguiu-se ir até 185 metros de profundidade.




Csór, Hungria
Um criador de modelos 3D
Em Junho de 2021, a equipa viajou para a Hungria para fazer o seu primeiro trabalho comercial. Era um poço de recolha de água e a empresa que a geria precisava de um modelo a três dimensões, porque vai fazer obras e instalar novos equipamentos. “Era necessário conhecer o estado do poço e o veículo fez um mapeamento de precisão”, refere Alfredo Martins.





Molnár János, Hungria
No centro de Budapeste
É uma gruta num sistema de águas termais e fica mesmo no centro da capital húngara. Não é muito profunda, mas é relativamente extensa e usada para treino de mergulhadores de salvamento. Aqui, foram executadas tarefas de desenvolvimento de sistema do robô.
.jpg?v2)
.jpg?v2)
.jpg?v2)
Solotvyno, Ucrânia
Minas de sal abandonadas
A equipa foi três vezes a Solotvyno, na Ucrânia. Estas são grandes minas de sal abandonadas, com galerias de onde se retira sal. Estão cheias de água. Com a entrada de água doce, a água vai dissolvendo o sal das paredes e há o risco de desabamento. “Quando entram em colapso, abrem-se crateras à superfície”, diz Alfredo Martins. O objectivo do robô foi mapear o ambiente e recolher amostras de água para conhecer o estado do local. O veículo foi a uma pressão equivalente até 435 metros de profundidade.



South Crofty, Reino Unido
Uma antiga estação de bombagem
Já não estava a ser usada e uma empresa queria conhecer o estado de uma das salas a cerca de 150 metros de profundidade. Nessa sala, estava uma antiga estação de bombagem e queria saber-se como estava o espaço. Não foi possível tirar imagens de forma clara a essa estação, mas percebeu-se que o acesso à sala estava fechado.


Ecton, Reino Unido
Um parque arqueológico
Encerrado há mais de 150 anos, Ecton é agora um parque arqueológico. Robô foi a lugares a que antes não se tinha ido nesses anos de abandono e recolheu dados.


Kobánya, Hungria
Como um edifício inundado
É uma pedreira subterrânea em Budapeste. Tem galerias cavadas na rocha debaixo de terra que foram usadas para delas se retirar pedras para a construção de edifícios na cidade no período do Império Austro-Húngaro. Tem áreas inundadas. “É quase como um edifício inundado: tem escadas, paredes, salas ou corredores e portas. Era um cenário diferente e bom para testes”, recorda Alfredo Martins. Uma das tarefas do robô foi fazer modelos 3D do sítio.






Hranická, República Checa
Recorde atingido!
Um dos objectivos na República Checa era bater o recorde do mundo em exploração de grutas inundadas. E foi atingido em Julho de 2022! O robô chegou aos 450 metros de profundidade. O recorde foi importante, mas a obtenção do mapa tridimensional por onde foi passando ainda foi mais. Próxima missão: bater o recorde atingido agora. Presume-se que a gruta tenha mais de 1000 metros de profundidade.
.jpg?v2)
.jpg?v2)
.jpg?v2)

FICHA TÉCNICA
Textos Teresa Serafim Infografia e Ilustração Gabriela Pedro Desenvolvimento web José Alves e Francisco Lopes Edição vídeo Joana Gonçalves e Carolina Pescada